Abstract
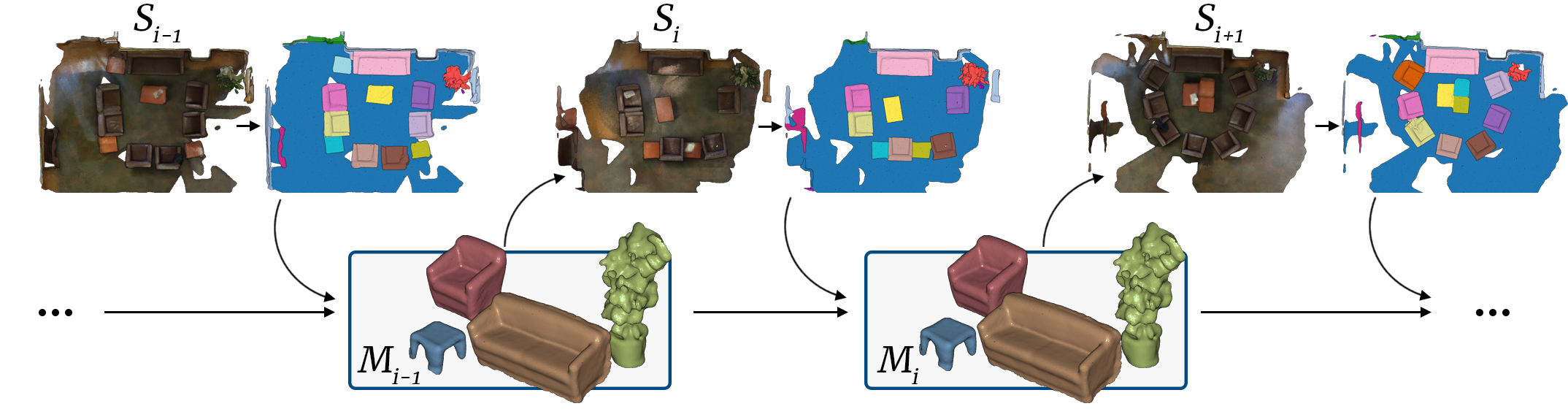
In depth-sensing applications ranging from home robotics to AR/VR, it will be common to acquire 3D scans of interior spaces repeatedly at sparse time intervals (e.g., as part of regular daily use). We propose an algorithm that analyzes these ``rescans'' to infer a temporal model of a scene with semantic instance information. Our algorithm operates inductively by using the temporal model resulting from past observations to infer an instance segmentation of a new scan, which is then used to update the temporal model. The model contains object instance associations across time and thus can be used to track individual objects, even though there are only sparse observations. During experiments with a new benchmark for the new task, our algorithm outperforms alternate approaches based on state-of-the-art networks for semantic instance segmentation.
Paper

Citation
@article{HalberRescan19,
title = {Rescan: Inductive Instance Segmentation for Indoor RGBD Scans},
author = {Maciej Halber and Yifei Shi and Kevin Kai Xu and Thomas Funkhouser},
booktitle = {ICCV},
year = {2019}
}
Additional Materials
Data
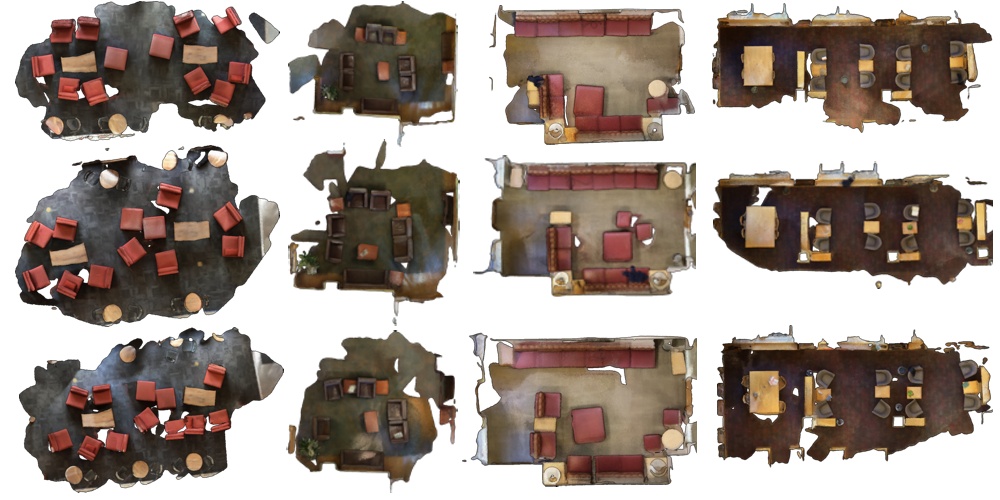
The Rescan Dataset contains 3D reconstructions of 45 sequences of 13 distinct common spaces like lounges, study areas and living rooms. Each space has been captured between 3 to 5 times. Between each capture, the objects within the scene were moved in the way that long-term changes that are likely to occur in such spaces. In most cases, objects were newly introduced or removed from the scene as they would be in natural use. The captured spaces are relatively large, with an average approximate area of \(67.58m^2\).
The main feature of the Rescan dataset is the presence of object associations across time. These associations are expressed in the form of stable instance segmentation -- object A has the same unique instance id in all time-steps \(t_0, t_1, ..., t_n\).
Folder Structure
rescan_dataset_root ├── scene_a | └── color [color video streams for each sequence] | └── depth [depth video streams for each sequence] | └── gt_segmentation [ply files containing seqmentation] ├── scene_b ├── ... └── scene_m
Ply File Format
All Rescan Ply files are stored in binary little endian format. Apart from standard \([x,y,z]\), \([nx, ny, nz]\), \([red, green, blue]\) flags for position, normal and color, this format also stores \(radius\) property for visualization, \(class\_idx\) for semantic class id, and \(instance\_idx\) for instance id. Overall the ply header is:
ply format binary_little_endian 1.0 element vertex 282892 property float x property float y property float z property float nx property float ny property float nz property uchar red property uchar green property uchar blue property float radius property int class_idx property int instance_idx end_header
Provided code will parse ply files in such format.